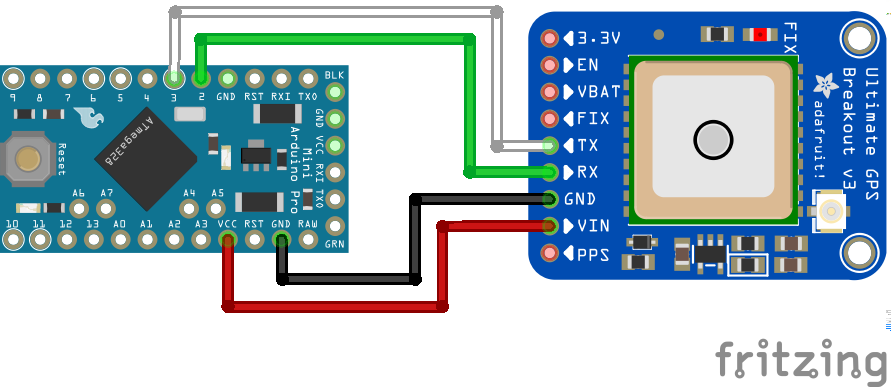
The default 9600 baud rate is a little too fast for the 8MHz clock speed of the Pro Mini 3v3 when using a software serial connection. This can result in invalid data being received from the GPS.
NMEA messages include a basic
checksum to ensure the message was received correctly. In the example
below the checksum for the message is 47 in hexidecimal, preceeded by
a * (the last 3 characters).
$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47
If the message is corrupted, e.g. if some characters are missed due to the 8MHz clock speed, the checksum will not compute.
Unfortunately if the message checksum itself is corrupt and the * is lost the Adafruit GPS library blindly continues, resulting in invalid data being parsed and provided to the user (GitHub issue #67). This happened to me when I switched from an Arduino Uno to an Arduino Pro Mini in a project and started to get unusual data from the GPS.
The solution is to request a connection with the GPS at a lower baud
rate. This can be done with a PMTK251 message as demonstrated below
(based on Adafruit examples).
SoftwareSerial mySerial(3, 2);
Adafruit_GPS GPS(&mySerial);
void setup(void) {
GPS.begin(9600); // initial connection at 9600 baud
GPS.sendCommand("$PMTK251,4800*14"); // request downgrade to 4800
mySerial.end(); // close the connection
delay(1000); // wait...
GPS.begin(4800); // reconnect at 4800 baud
// continue as normal...
GPS.sendCommand(PMTK_SET_NMEA_OUTPUT_RMCGGA);
GPS.sendCommand(PMTK_SET_NMEA_UPDATE_1HZ);
useInterrupt(true);
mySerial.println(PMTK_Q_RELEASE);
}As an aside, the checksum of an NMEA message can easily be computed in
Python, which I used to calculate the checksum for this message. The
checksum is computed for everything between $ and * in the message.
def nmea_checksum(message):
checksum = 0
for c in message:
checksum ^= ord(c)
return checksum
check_dec = nmea_checksum("PMTK251,4800") # returns 20
check_hex = hex(check_dec) # returns '0x14', e.g. '*14'References
- NMEA Data. http://www.gpsinformation.org/dale/nmea.htm
- Adafruit GPS library. https://github.com/adafruit/Adafruit_GPS
- Adafruit GPS baud rates. https://forums.adafruit.com/viewtopic.php?f=8&t=71672